Automated Transport Mode Detection of GPS Tracking Data
Author
Cyril Geistlich, Micha Franz
Abstract
This project aims to investigate key factors and features in GPS tracking data to differentiate transportation vehicles. Machine learning is applied to automate transportation mode detection using spatial, temporal, and attribute analysis. Manual verification of results ensures accuracy. The findings contribute to computational movement analysis and automated transportation mode detection.
1. Introduction
In recent years, the spread of GPS-enabled devices and progress in location-based technologies have generated vast amounts of GPS tracking data. This data holds significant potential for extracting insights and to improve our understanding of human mobility patterns. One main application in this field is the differentiation of transportation modes. This can benefit various domains such as traffic management or urban planning. Determining the mode of transportation from GPS tracking data presents several challenges. With the ubiquitous increase of GPS tracking through smartphones and other technical devices, it’s too time consuming and expensive to manually annotate data and also prone to human error or biases. This leads to the following two research questions:
What are the key factors and features that can be extracted from GPS tracking data to differentiate between different types of transportation modes?
How can machine learning techniques be applied to GPS tracking data to automate the detection of the mode of transportation and which accuracies can be achieved by different machine learning algorithms?
The project will focus on exploring spatial and temporal aspects to extract key factors from GPS tracking data, such as velocity, sinuosity or angles. Additionally, spatial context in the form of traffic networks and land cover is added to the data in order to improve the accuracy of transportation mode detection. Machine learning algorithms will be tested and employed to automate the classification of transportation modes. An accurate algorithm is aimed to be found by training and evaluating different models on labeled data. These models include random forests, support vector machines or neural networks. To ensure the accuracy of the models, a subset of the classified data is used to validate the performance. By comparing the results of the automated classification with ground truth data, the project aims to assess the achieved accuracies of different machine learning algorithms and identify areas for improvement.
2. Data
The main data are the GPS tracking data, which were recorded through the Posmos App via smartphone throughout a time span of approximately 1.5 months by the two authors and from the available data pool. The complete collected data was manually labelled to ensure a valid ground truth. Further, spatial context data such as the Swiss road network, tram network,1 train network2 and the bus network of the cantons of Zurich3 and Bern.4 (Note: There is no official data set for the entire Swiss bus network according to the federal bureau of transport. Thus the available ones for Bern and Zurich were used, where a significant amount of data points pertaining to bus usage were collected). To facilitate the detection of the transportation mode boat, land cover data containing all Swiss waters was also used.5
Code
library("dplyr")library("sf")library("readr") library("ggplot2")library("mapview")library("lubridate")library("zoo") library("caret")library("LearnGeom") # to calculate anglelibrary("geosphere") # to calculate distanceslibrary("RColorBrewer") # to create custom color palettelibrary("ggcorrplot") # for correlation matrixlibrary("ROSE")library("gridExtra")
Code
# creates lines out of points, used for visualisation purposespoint2line <-function(points){ geometries <-st_cast(st_geometry(points %>%select(geometry)), "POINT") n <-length(geometries) -1 linestrings <-lapply(X =1:n, FUN =function(x) { pair <-st_combine(c(geometries[x], geometries[x +1])) line <-st_cast(pair, "LINESTRING")return(line) }) multilinetring <-st_multilinestring(do.call("rbind", linestrings)) df <-data.frame(linestrings[1])for (i in2:length(linestrings)){ temp <-data.frame(linestrings[i]) df <-rbind(df, temp) } sf_lines <- df %>%st_as_sf()}un_col <-function(df){return(length(unique(df)))}
Code
# read personal tracking dataposmo_micha_truth_csv <-read.delim("data/manually_labelled/posmo_20230502_to_20230613_m.csv",sep=",") posmo_cyril_truth_csv <-read.delim("data/manually_labelled/posmo_2023-05-01T00_00_00+02_00-2023-06-26T23_59_59+02_00.csv",sep=",") posmo_micha_csv <-read.delim("data/posmo_labelled/posmo_20230502_to_20230613_p.csv",sep=",") # read tracking data from poolposmo_pool_1 <-read.delim("data/manually_labelled/posmo.csv",sep=",") %>%tail(612) # last 250 data points are not correctly labelledposmo_pool_2 <-read.delim("data/manually_labelled/posmo_2.csv",sep=",") posmo_pool_3 <-read.delim("data/manually_labelled/posmo_BuJa.csv",sep=",")
process_posmo_data <-function(posmo_data) { # function with data cleaning steps# Convert to sf object posmo_data <- posmo_data %>%st_as_sf(coords =c("lon_x", "lat_y"), crs =4326) %>%st_transform(crs =2056)# Remove unwanted columns posmo_data <- posmo_data[, -c(1, 3, 4)]# Fix Timestamp posmo_data$datetime <-ymd_hms(posmo_data$datetime) +hours(2)# Add ID to rows posmo_data <- posmo_data %>%mutate(id =row_number())# remove duplicate time values posmo_data <- posmo_data[!duplicated(posmo_data$datetime), ]# remove subsequent duplicate location (person wasn't moving) posmo_data <- posmo_data %>%filter(geometry !=lead(geometry))return(posmo_data)}
3. Methods
3.1 Preprocessing
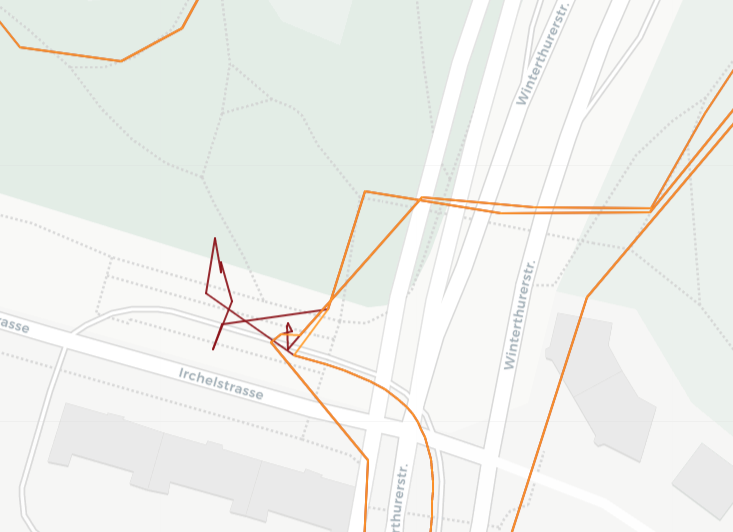
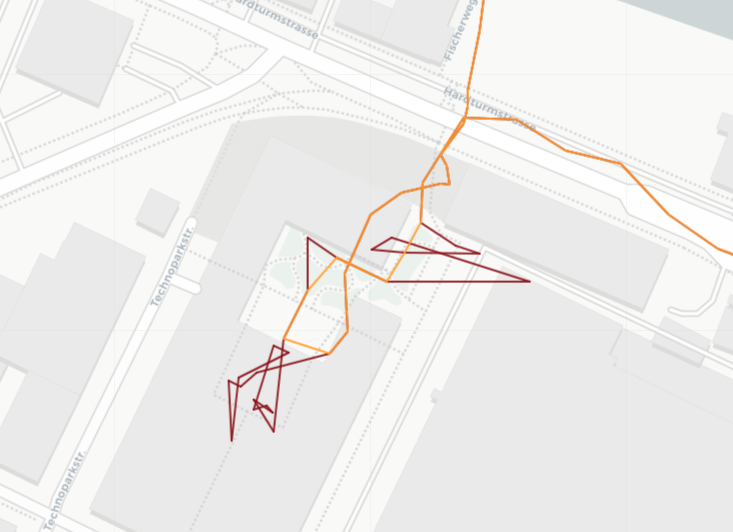
When tracking a person throughout the day using GPS data, there are instances where the person appears to be stationary, such as when in an office or at a university. However, due to GPS inaccuracies, these stationary points may not appear at the exact same location and can exhibit erratic movement patterns. The accuracy of GPS signals is often compromised in dense buildings, amplifying this phenomenon. The figure below shows an example of this phenomenon around the Irchel campus of the University of Zurich.
As a result, parameters like velocity and step length can show values that are typically associated with other categories. To address this issue, two approaches have been employed.
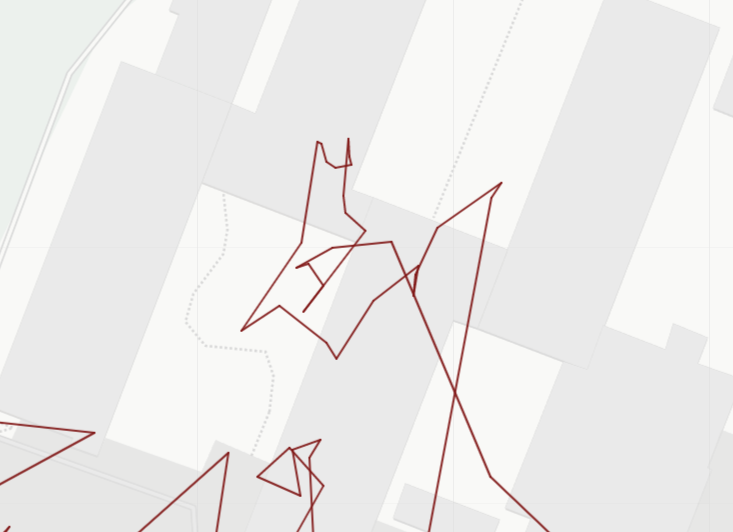
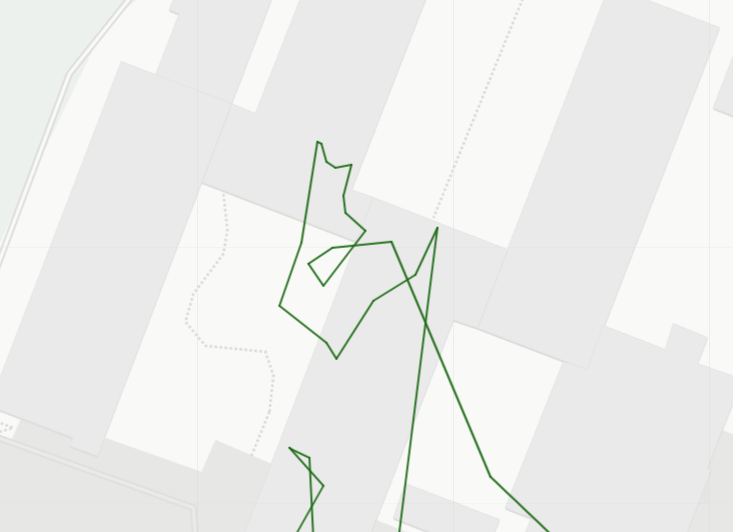
The first approach involves analyzing the angles between consecutive points. Typically, these angles are significantly smaller for stationary points compared to other movements. By visually determining a threshold angle the data set is filtered to remove all data points with angles smaller than 60°. This process needs to be repeated iteratively until no angles below the threshold remain, as the removal of data points alters the angles between the remaining points. The figure below shows the first three iterations of this process, removing more and more points with angles below the threshold.
In certain situations, small angles can occur naturally and are not indicative of errors. However, the current approach of removing points based on angle thresholds may mistakenly eliminate these valid data points. This becomes particularly problematic when dealing with sharp changes in direction, such as U-turns or sudden turns. When a sharp change in direction occurs, the angle between the points just before and after the turn may be small, potentially triggering the removal of these points. As a consequence, the removal of these points alters the data set, requiring the recalculation of angles. This subsequent recalculation can lead to the removal of additional points and the inadvertent loss of significant segments of data. The figures below illustrate this phenomenon.
However, through visual inspection of a representative amount of data, it appeared that this only occurs rarely.
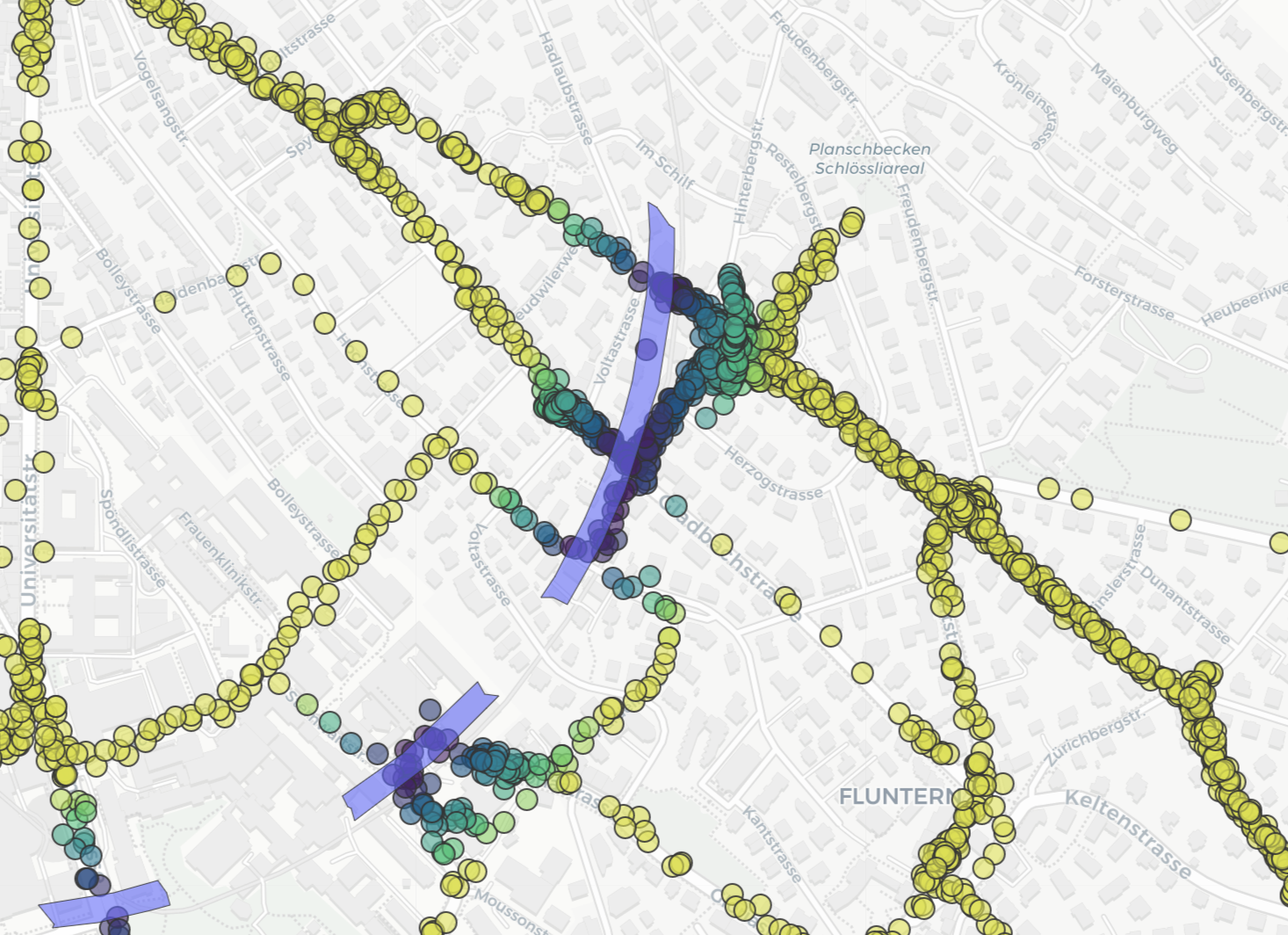
The second approach considers the distance between the current point and a set number of preceding and consecutive points. A point is deemed static if the maximum distance between that point and any of the set number of preceding or consecutive points exceeds a predefined distance threshold. However, this approach may unintentionally remove non-static data points, particularly when a person is walking slowly and numerous data points are recorded within a small distance. Adjusting the distance threshold or the number of preceding and consecutive points can mitigate this issue, but it requires striking a balance between filtering out false movements and retaining genuine data. The sampling rate of Posmos was set to 10 or 15 seconds, but in some cases, data points were recorded every three seconds. Obviously, this enhances the the chances of removing data in the just described way. Since this behavior was not expected and only discovered late in the process, the point exhibiting an abnormally short sampling interval were not removed prior to preprocessing.
Finding the optimal compromise between these filtering approaches involves considering the specific characteristics of the tracked person’s movements and the quality of the GPS data. By iteratively applying the angle-based filtering and analyzing the distance to surrounding points, a more accurate identification of stationary periods can be achieved, mitigating the impact of GPS inaccuracies and preserving the integrity of the tracking data. Thus, the thresholds were set by trial and error.
The figures below show before/after visualizations of this process.
Code
filterStaticByDistance <-function(data, threshold_distance, consecutive_points) {require(geosphere)# transform to WGS84, necessary to calculate distance using geosphere data <- data %>%st_transform(4326)# Extract coordinates from the geometry coords <-data.frame(st_coordinates(data)) data$longitude <- coords$X data$latitude <- coords$Y# Calculate distances to preceding and consecutive points distances <-numeric(nrow(data))for (i in (consecutive_points +1):(nrow(data) - consecutive_points)) { next_points <- coords[(i +1):(i + consecutive_points), ] prev_points <- coords[(i -1):(i - consecutive_points), ] all_points <-rbind(next_points, prev_points) distances[i] <-max(geosphere::distGeo(coords[i, ], all_points)) }# Filter out points where the maximum distance exceeds the threshold filtered_data <- data[distances >= threshold_distance | distances ==0, ] # keep first/last values which are 0# Transform back to LV95 filtered_data <- filtered_data %>%st_transform(2056)return(list(filtered_data = filtered_data, distances = distances)) # distances are just needed for testing thresholds}
Code
getAngle <-function(coords) { angles <-numeric(nrow(coords)) # Initialize angles as a numeric vector angles[1] =NA# first point can't have an anglefor (i in2:(nrow(coords) -1)) { # calculate the angle for 3 consecutive points, similar to lag/lead angle <-Angle( #function from library LearnGeomc(coords[i -1, "X"], coords[i -1, "Y"]),c(coords[i, "X"], coords[i, "Y"]),c(coords[i +1, "X"], coords[i +1, "Y"]) ) angles[i] <- angle # Assign the calculated angle to the corresponding index in angles } angles[nrow(coords)] =NA# last point cant have an anglereturn(c(angles))}
Code
filterStaticByAngle <-function(working_dataset, angleTreshold){ coords <-data.frame(st_coordinates(working_dataset), working_dataset$id) working_dataset$angle <-getAngle(coords) min_angle <-min(working_dataset$angle, na.rm = T)while (min_angle <= angleTreshold) { # iteratively filter out tight angles until none smaller 60 are left working_dataset <- working_dataset %>%filter(is.na(angle) | angle > angleTreshold) # exclude first and last value (=NA) coords <-data.frame(st_coordinates(working_dataset), working_dataset$id) working_dataset$angle <-getAngle(coords) min_angle <-min(working_dataset$angle, na.rm = T) }return(working_dataset)}
3.2 Movement Parameters
As variables for the machine learning models the following movement parameters have been calculated:
Due to similar movement parameters for transportation modes it is a particularly challenging task to automatically classify transportation modes using only movement parameters. Bus and tram in cities for example, exhibit very similar characteristics. To facilitate the classification task, the data was enriched with spatial context data in the form of various networks and land cover, as mentioned in the data description. By incorporating this spatial context data, the classification process can be enhanced by considering the surrounding environment in which the transportation modes operate. For every data point, the closest distance to the difference networks and water bodies was calculated. In some cases, the calculated distances to these networks or water bodies could be extremely large. Including such large values in the data set would lead to a significant span of values, potentially overshadowing smaller differences within cities. To avoid this issue, a decision was made to set a maximum distance of 100m. Any distance beyond 100m was assigned a value of 100m. By setting this threshold, the data set ensures that distances beyond 100m are treated as equal, effectively reducing the influence of extremely large distances on the classification task.
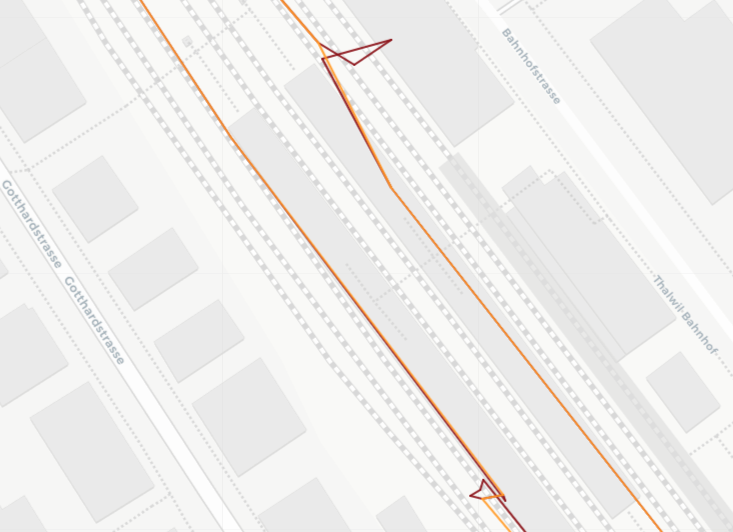
It is important to note that the distance calculation in the data set may not always provide an accurate representation of real distances, especially in cases involving tunnels or underground passages with overlaying data points. An example of this can be seen below, where a tunnel leads close underneath the house of one of the authors and wrong distance proximites are calculated. (Side note: For processing reasons, the networks were intersected with the data points, prior to the distance calculations, that’s why only these parts of the tunnel are visible)
Code
# since some of the networks are extremly large data sets, a buffer of all data points were intersected with the networks, and only the network segments that intersected were used to calculate the distance. this was done once and then written as data set, so that this doesnt have to be computed every time#data_AOI <- st_buffer(working_dataset, 50) %>% st_union()tram_netz_AOI <-read_sf("processed_data/tram_netz_AOI.shp")bus_netz_AOI <-read_sf("processed_data/bus_netz_AOI.shp")zug_netz_AOI <-read_sf("processed_data/zug_netz_AOI.shp")gewaesser_AOI <-read_sf("processed_data/gewaesser_AOI.shp")strassen <-read_sf("processed_data/strassen.shp")#tram_netz_AOI <- st_intersection(tram_netz, data_AOI)working_dataset$distance_tram <-as.numeric(st_distance(working_dataset, tram_netz_AOI))working_dataset$distance_tram <-ifelse(working_dataset$distance_tram >100, 100, working_dataset$distance_tram)#zug_netz_AOI <- st_intersection(zug_netz, data_AOI)working_dataset$distance_zug <-as.numeric(st_distance(working_dataset, zug_netz_AOI))working_dataset$distance_zug <-ifelse(working_dataset$distance_zug >100, 100, working_dataset$distance_zug)#gewaesser_AOI <- st_intersection(gewaesser, data_AOI)working_dataset$distance_gewaesser <-as.numeric(st_distance(working_dataset, gewaesser_AOI))working_dataset$distance_gewaesser <-ifelse(working_dataset$distance_gewaesser >100, 100, working_dataset$distance_gewaesser)#bus_netz_AOI <- st_intersection(bus_netz, data_AOI)working_dataset$distance_bus <-as.numeric(st_distance(working_dataset, bus_netz_AOI))working_dataset$distance_bus <-ifelse(working_dataset$distance_bus >100, 100, working_dataset$distance_bus)working_dataset$distance_strasse <-as.numeric(st_distance(working_dataset, strassen))working_dataset$distance_strasse <-ifelse(working_dataset$distance_strasse >100, 100, working_dataset$distance_strasse)
# Replace NA values with a specified value (e.g., mean, median, or 0)working_dataset$sinuosity[is.infinite(working_dataset$sinuosity)] <-NAworking_dataset <-na.omit(working_dataset)posmo_pool$sinuosity[is.infinite(posmo_pool$sinuosity)] <-NAposmo_pool <-na.omit(posmo_pool)
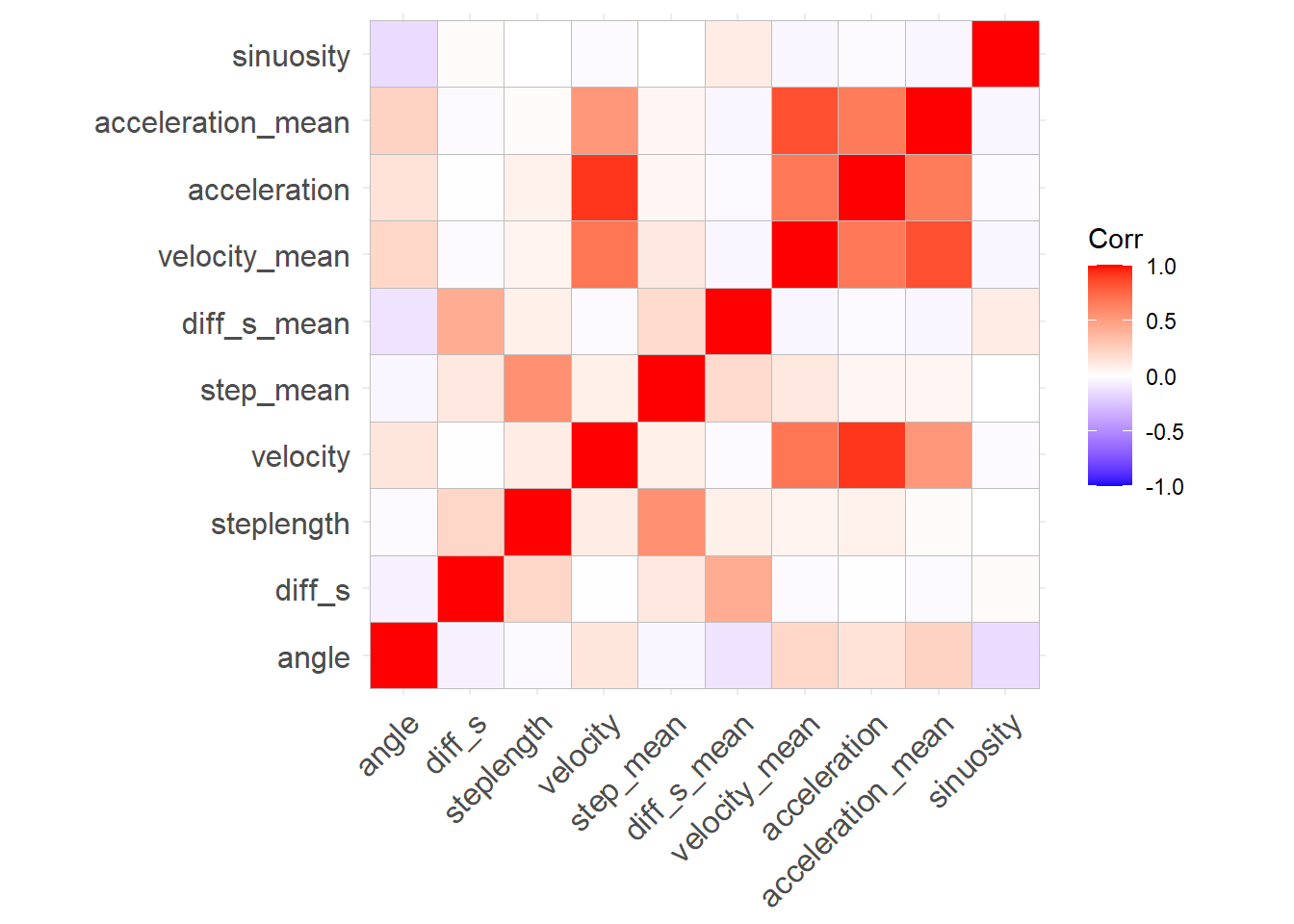
3.4 Variable Correlation
The correlation matrix shows correlation between variables. Computed velocities and acceleration correlate strongly. Other variables show only little correlation.
Code
# select columns with relevant variable and standardize themstandardized <- working_dataset[, 6:15] %>%st_drop_geometry() %>%scale(center =TRUE, scale =TRUE) %>%as.data.frame()corr_matrix <-cor(standardized)ggcorrplot(corr_matrix)
# Save full dataset as csvworking_dataset <-st_drop_geometry(working_dataset)posmo_pool <-st_drop_geometry(posmo_pool)write.csv(working_dataset, file ="data/full_working_dataset.csv", row.names = F)write.csv(posmo_pool, file ="data/full_posmo_pool_dataset.csv", row.names = F)
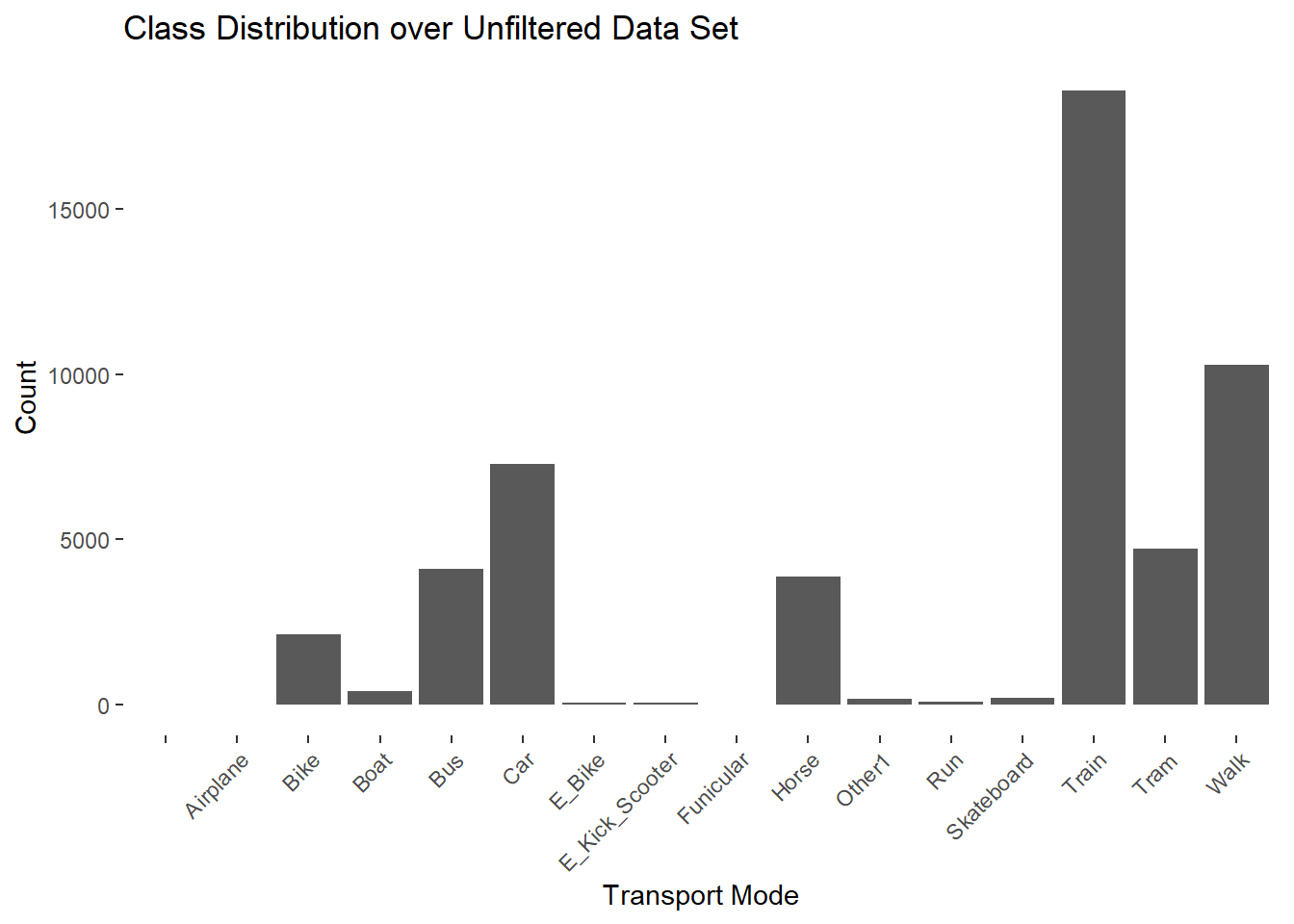
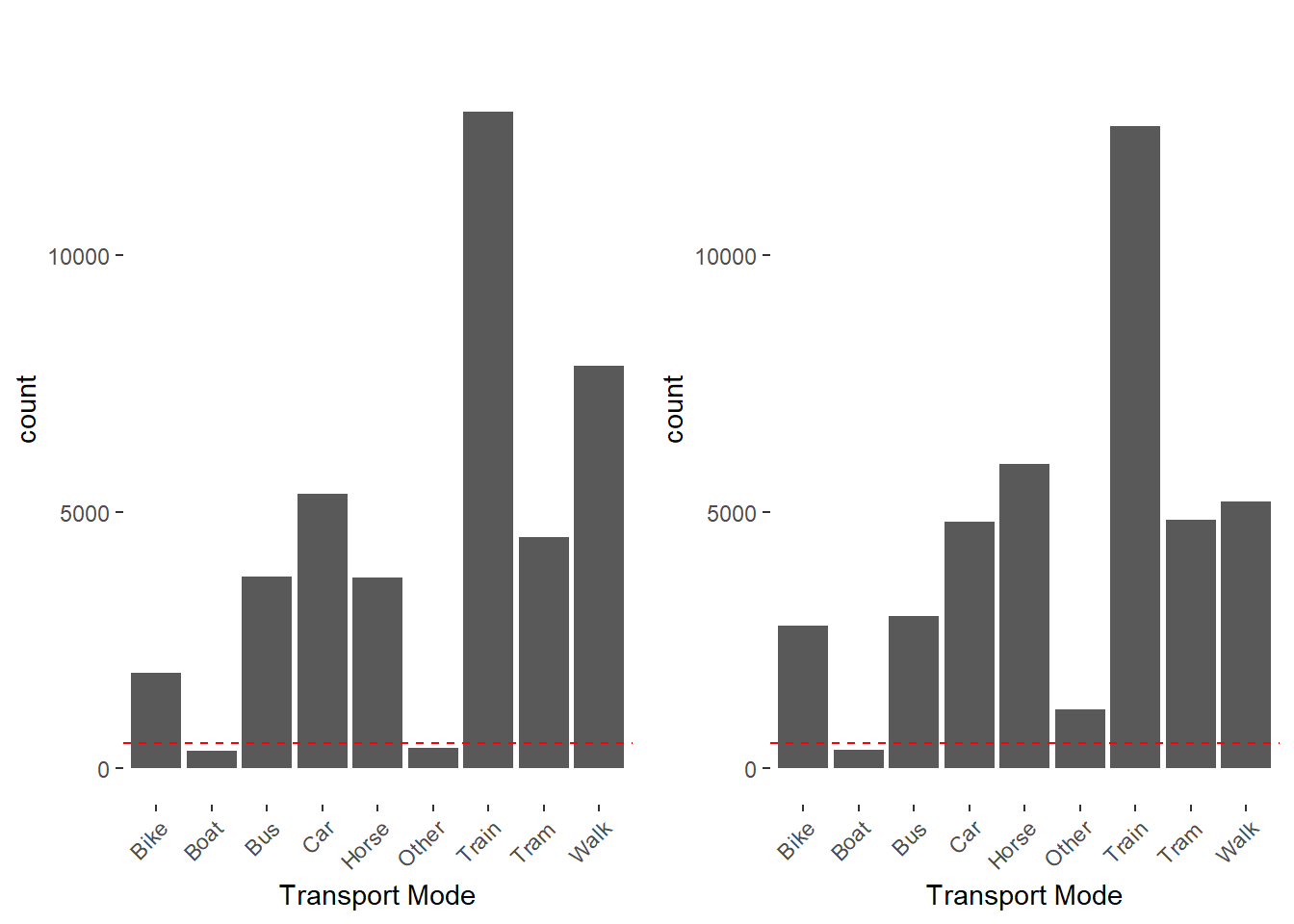
3.5 Class Distribution Overview
Code
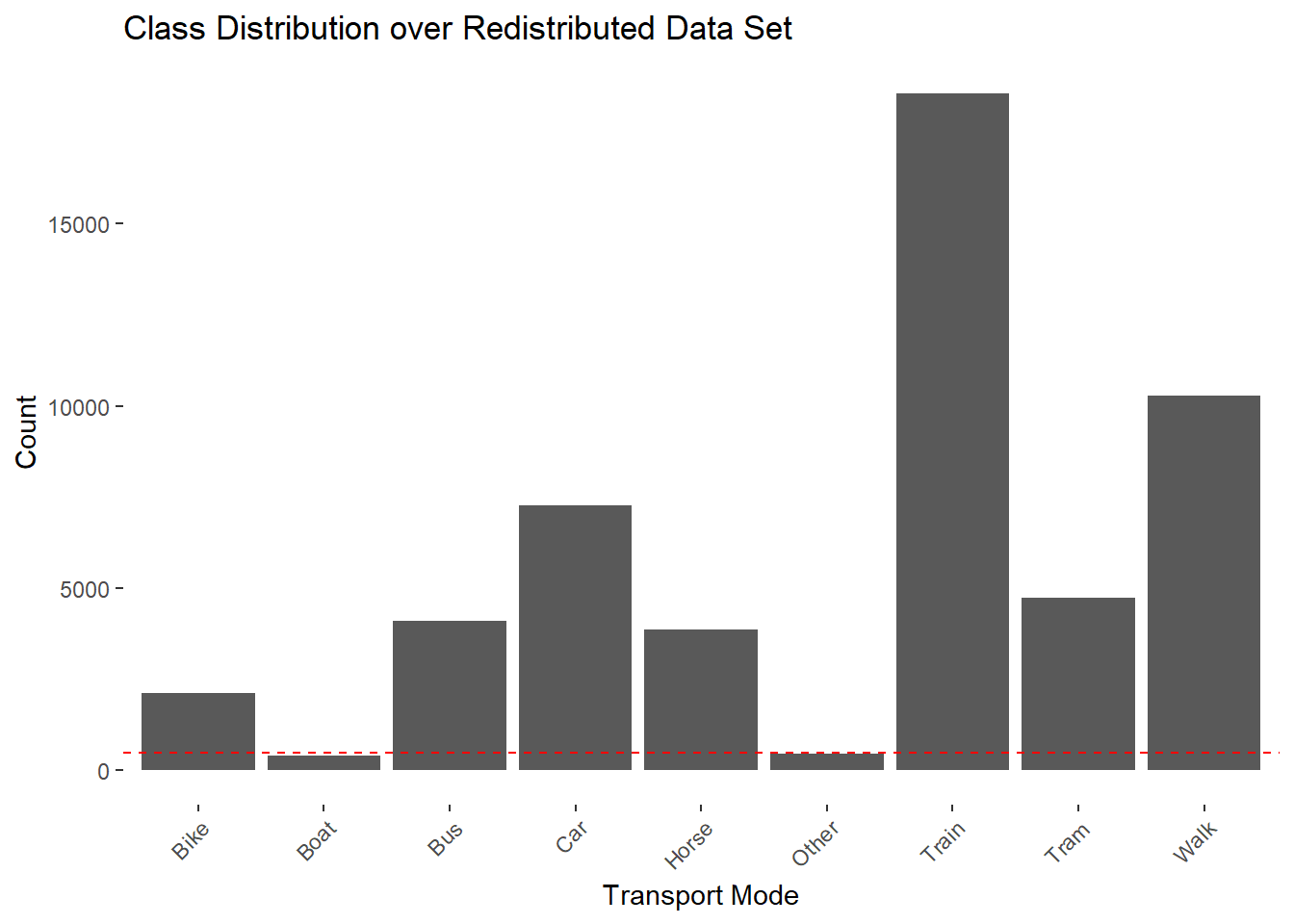
working_dataset <-read.delim("data/full_working_dataset.csv",sep=",", header = T) posmo_pool <-read.delim("data/full_posmo_pool_dataset.csv",sep=",", header = T) working_dataset <-rbind(working_dataset, posmo_pool)working_dataset <-na.omit(working_dataset)# Show class distributionggplot(working_dataset) +geom_bar(aes(x = transport_mode)) +theme(axis.text.x =element_text(angle =45, hjust =1)) +ggtitle("Class Distribution over Unfiltered Data Set") +xlab("Transport Mode") +ylab("Count")
The distribution shows that many classes are very poorly represented in the data. Unclassified data is removed and aggregated. The underrepresented transport modes are moved to the class “Other”.
Bike Boat Bus Car Horse Other Train Tram Walk
2120 417 4100 7272 3866 468 18581 4732 10281
The dotted red line lies at a count of 500, representing the desired sample count for the following under sampling of our data set.
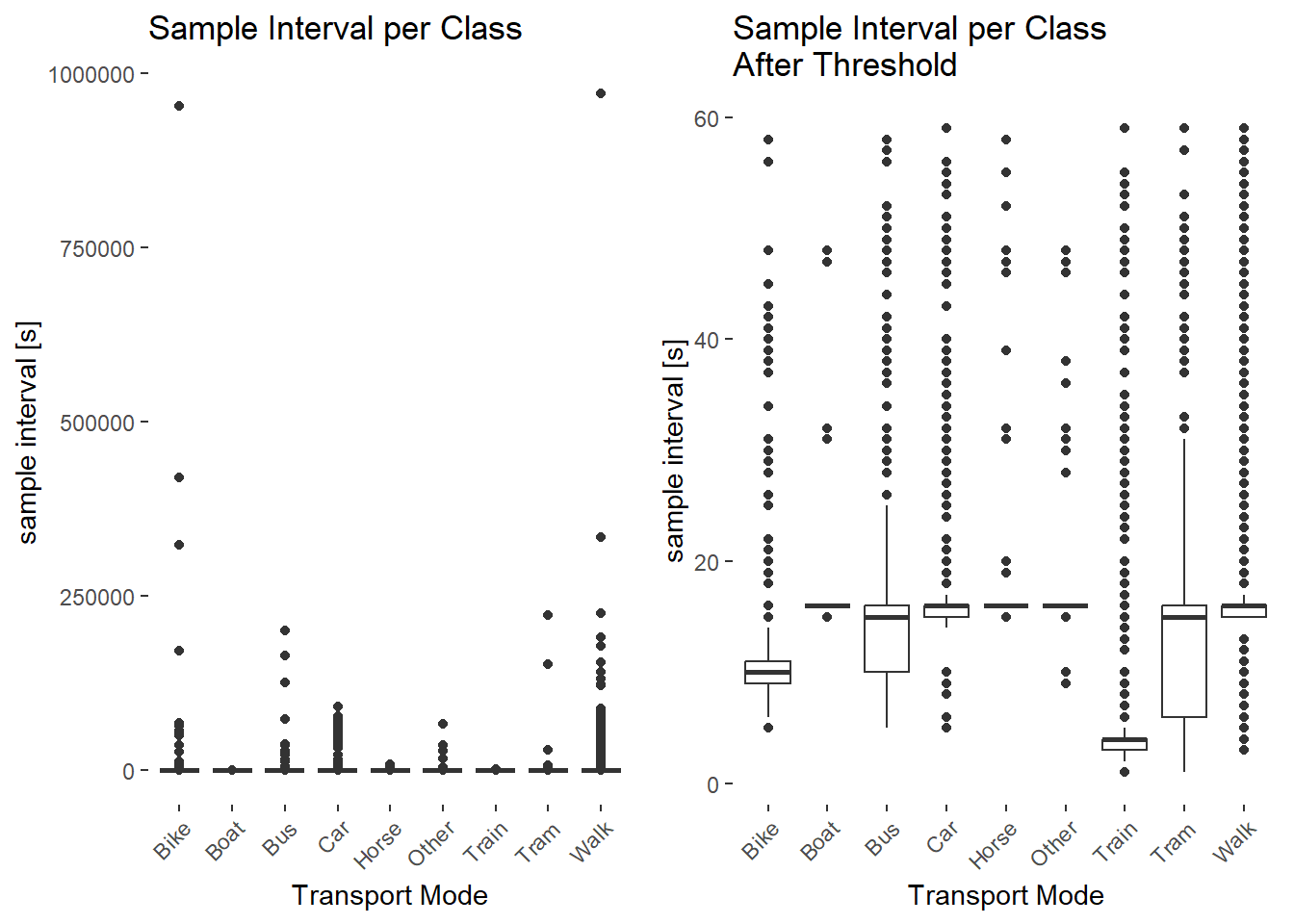
3.6 Sampling Interval
The sampling intervals were found to be highly inconsistent. Many large sampling intervals originate from the tracked person being stationary. Therefore the sampling interval is limited to 60 seconds. No re-sampling to equalize the sampling interval is undertaken, to preserve the GPS position and the calculated parameters for each data point, since with large sampling intervals the calculated movement parameters become inaccurate and unrepresentative of the transport mode. After applying the threshold the actual sampling interval of 10, respective 15 seconds can be seen in the box plot.
Code
boxplot_diff_s <-ggplot(working_dataset,aes(x = transport_mode, y = diff_s)) +geom_boxplot() +theme(axis.text.x =element_text(angle =45, hjust =1)) +ylab("sample interval [s]") +xlab("Transport Mode") +ggtitle("Sample Interval per Class")# Set threshold for parametersworking_dataset <- working_dataset[working_dataset$diff_s <60,]boxplot_diff_s_after <-ggplot(working_dataset, aes(x = transport_mode, y = diff_s)) +geom_boxplot() +theme(axis.text.x =element_text(angle =45, hjust =1)) +ylab("sample interval [s]") +xlab("Transport Mode") +ggtitle("Sample Interval per Class \nAfter Threshold")# Display the plots side by sidegrid.arrange(boxplot_diff_s, boxplot_diff_s_after, nrow =1)
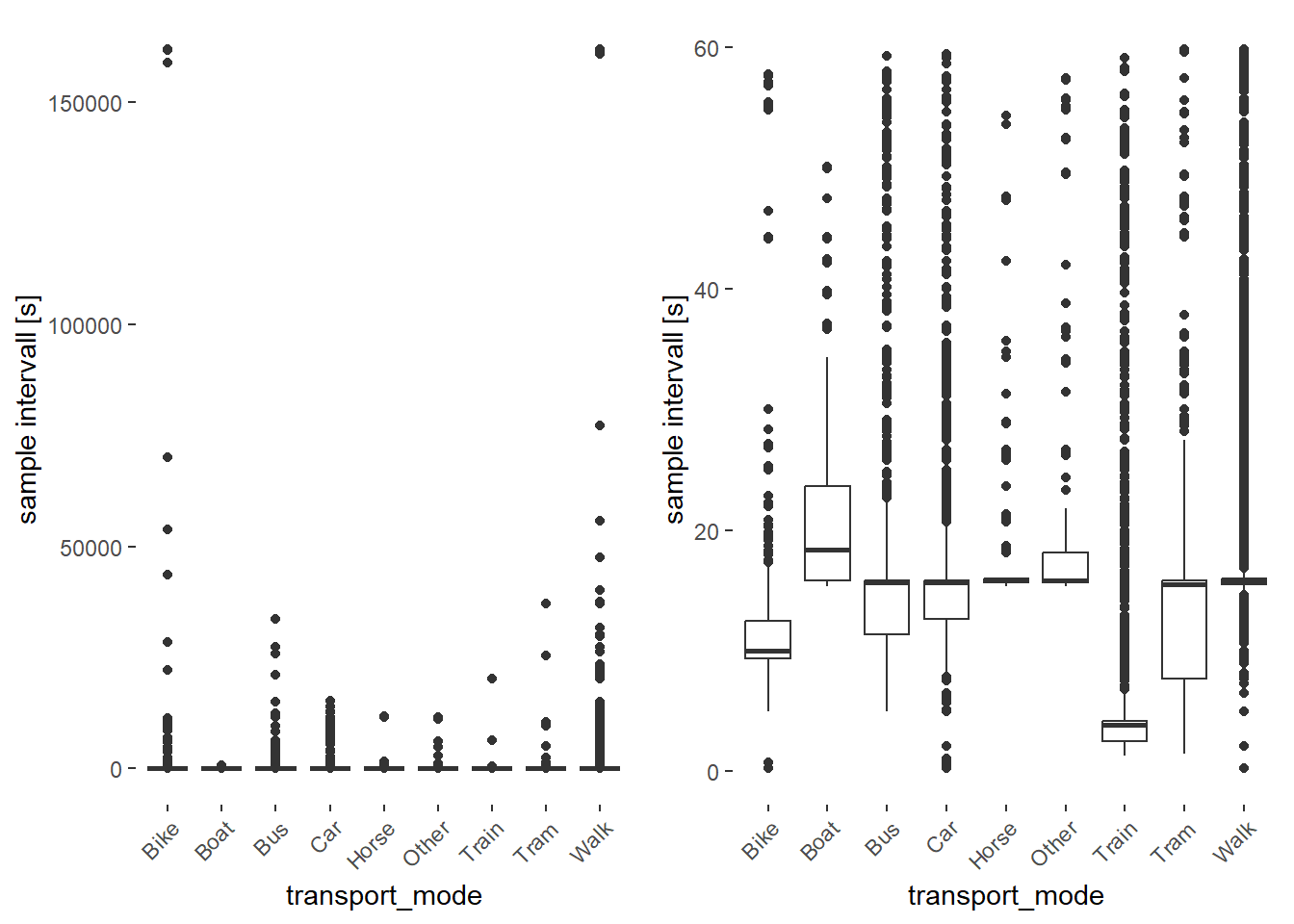
After the initial removal of sampling intervals larger than 60 seconds the step for the moving window sampling intervals is repeated.
Code
boxplot_diff_s_mean <-ggplot(working_dataset, aes(x = transport_mode, y = diff_s_mean)) +geom_boxplot() +theme(axis.text.x =element_text(angle =45, hjust =1)) +ylab("sample intervall [s]")# Set threshold for parametersworking_dataset <- working_dataset[working_dataset$diff_s_mean <60,]boxplot_diff_s_mean_after <-ggplot(working_dataset, aes(x = transport_mode, y = diff_s_mean)) +geom_boxplot() +theme(axis.text.x =element_text(angle =45, hjust =1)) +ylab("sample intervall [s]")# Display the plots side by sidegrid.arrange(boxplot_diff_s_mean, boxplot_diff_s_mean_after, nrow =1)
3.7 Parameter Thresholds
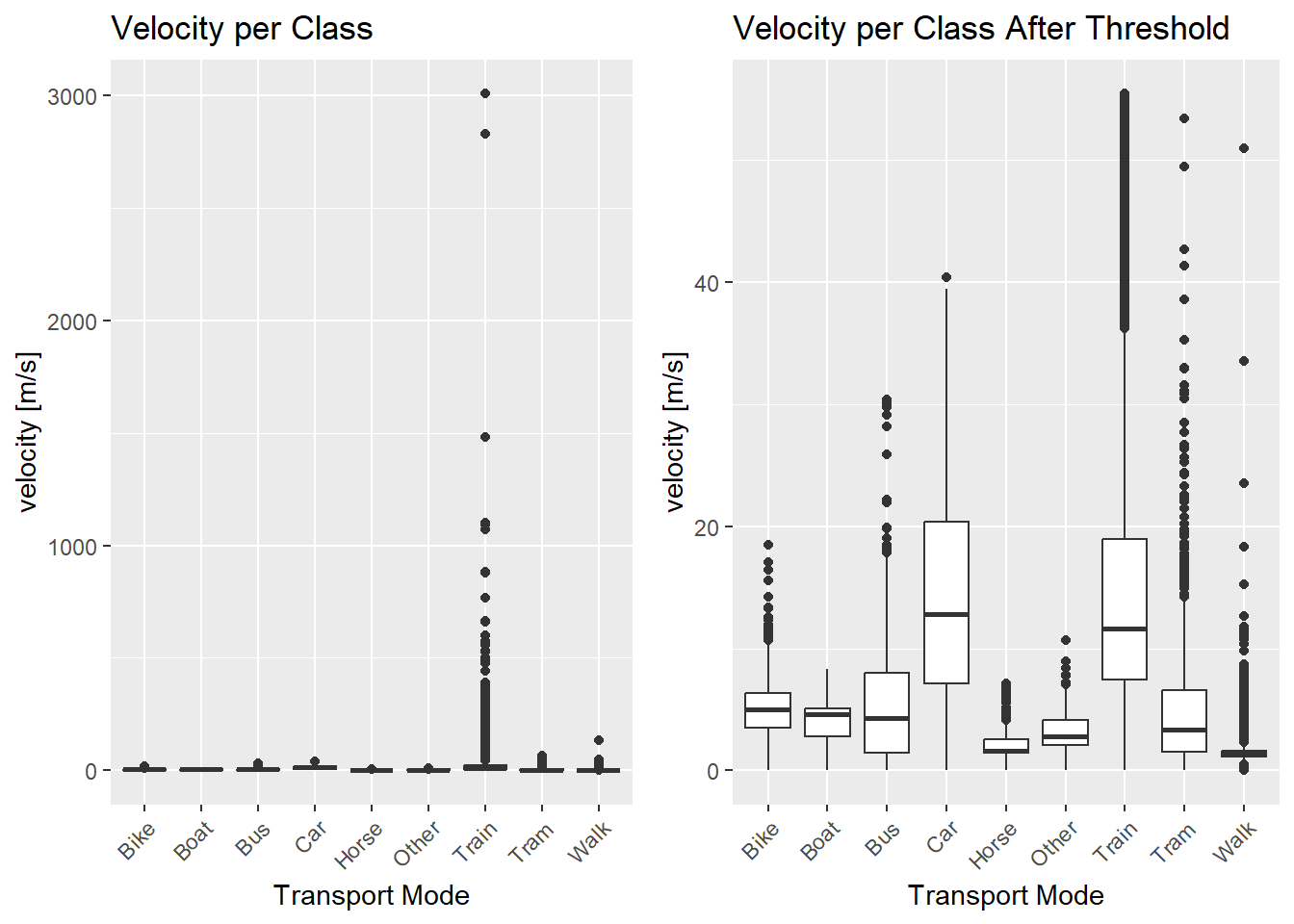
3.7.1 Velocity
The velocity attribute shows some outliers for the train class and walking class. The threshold for maximum velocity is set to 55.55 m/s (200km/h ), as no transport mode in our analysis is expected to exceed such velocity. One exception are airplanes, but with only very few data points there is no benefit in including higher velocities. After setting the threshold some obvious outliers remain for the walking class. Reasons for such outliers in the calculated velocity could be:
Wrong Classification, even though the data is verified.
GPS inaccuracies, where the GPS point location is “jumping” creating very inaccurate, zigzagging tracking data.
Code
boxplot_velocity <-ggplot(working_dataset, aes(x = transport_mode, y = velocity)) +geom_boxplot() +theme(axis.text.x =element_text(angle =45, hjust =1)) +ylab("velocity [m/s]") +xlab("Transport Mode") +ggtitle("Velocity per Class")# Set threshold for parametersworking_dataset <- working_dataset[working_dataset$velocity <55.55,]boxplot_velocity_after <-ggplot(working_dataset, aes(x = transport_mode, y = velocity)) +geom_boxplot() +theme(axis.text.x =element_text(angle =45, hjust =1)) +ylab("velocity [m/s]") +xlab("Transport Mode") +ggtitle("Velocity per Class After Threshold")# Display the plots side by sidegrid.arrange(boxplot_velocity, boxplot_velocity_after, nrow =1)
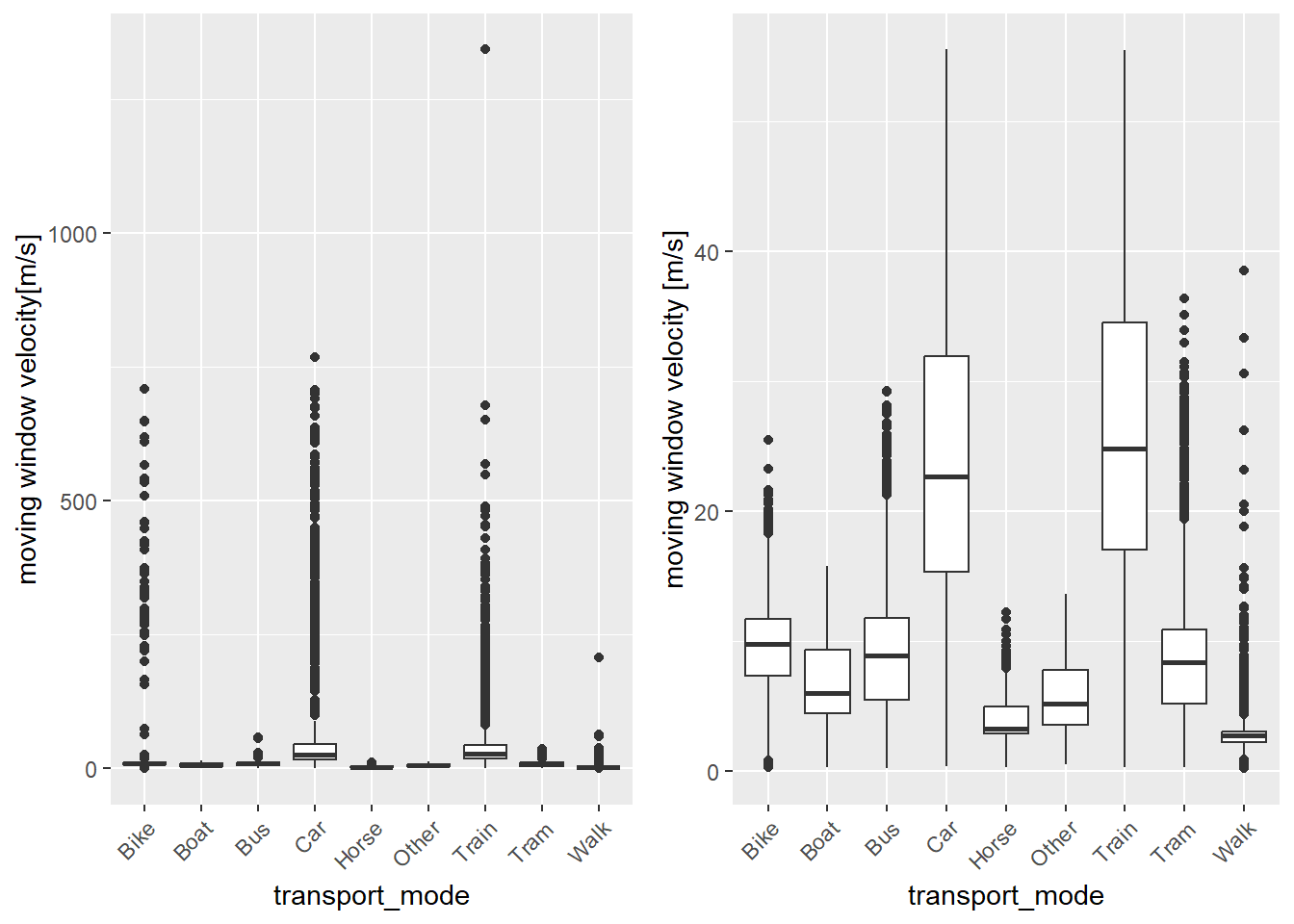
3.7.2 Moving Window Velocity
The moving window velocity shows less extreme outliers. The number of outliers can be reduced further by removing setting the trheshold to 55.5m/s (200km/h). After applying the threshold classes with similar average velocities can be identified. This might already be an indicator for classes which are difficult to distinguish using classification methods.
Code
boxplot_velocity_mean <-ggplot(working_dataset, aes(x = transport_mode, y = velocity_mean)) +geom_boxplot() +theme(axis.text.x =element_text(angle =45, hjust =1)) +ylab("moving window velocity[m/s]")# Set threshold for parametersworking_dataset <- working_dataset[working_dataset$velocity_mean <55.55,]boxplot_velocity_mean_after <-ggplot(working_dataset, aes(x = transport_mode, y = velocity_mean)) +geom_boxplot() +theme(axis.text.x =element_text(angle =45, hjust =1)) +ylab("moving window velocity [m/s]")# Display the plots side by sidegrid.arrange(boxplot_velocity_mean, boxplot_velocity_mean_after, nrow =1)
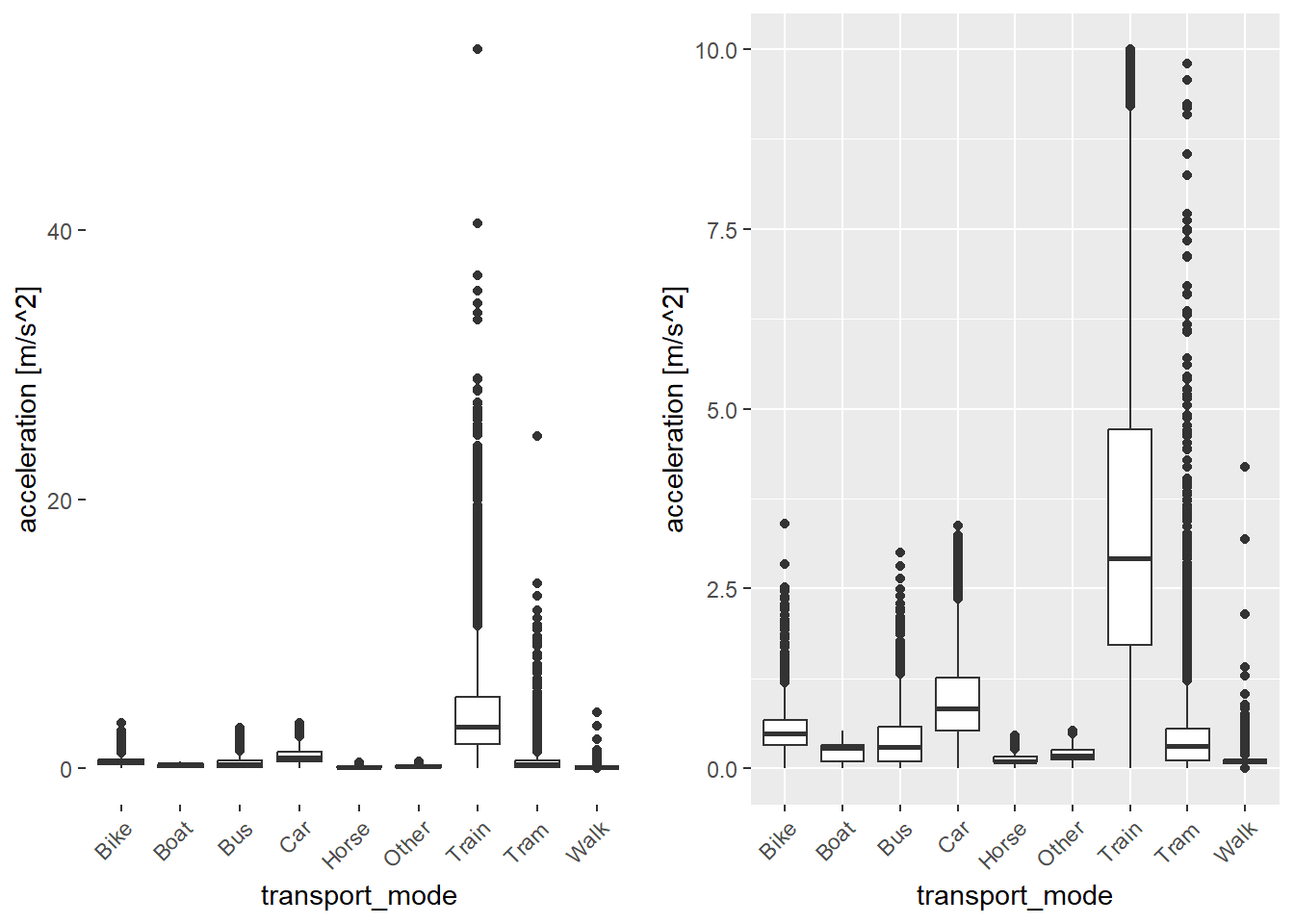
3.7.3 Acceleration
The acceleration threshold is set to 10m/s^2, as for this classification is considered to be the maximum possible acceleration for all classes. The distribution of the classes is similar to the velocities. In the parameter correlation analysis strong correlation between velocity and acceleration was found.
Code
boxplot_acceleration <-ggplot(working_dataset, aes(x = transport_mode, y = acceleration)) +geom_boxplot() +theme(axis.text.x =element_text(angle =45, hjust =1)) +ylab("acceleration [m/s^2]")# Set threshold for parametersworking_dataset <- working_dataset[working_dataset$acceleration <10,]boxplot_acceleration_after <-ggplot(working_dataset, aes(x = transport_mode, y = acceleration)) +geom_boxplot() +theme(axis.text.x =element_text(angle =45, hjust =1)) +ylab("acceleration [m/s^2]")# Display the plots side by sidegrid.arrange(boxplot_acceleration, boxplot_acceleration_after, nrow =1)
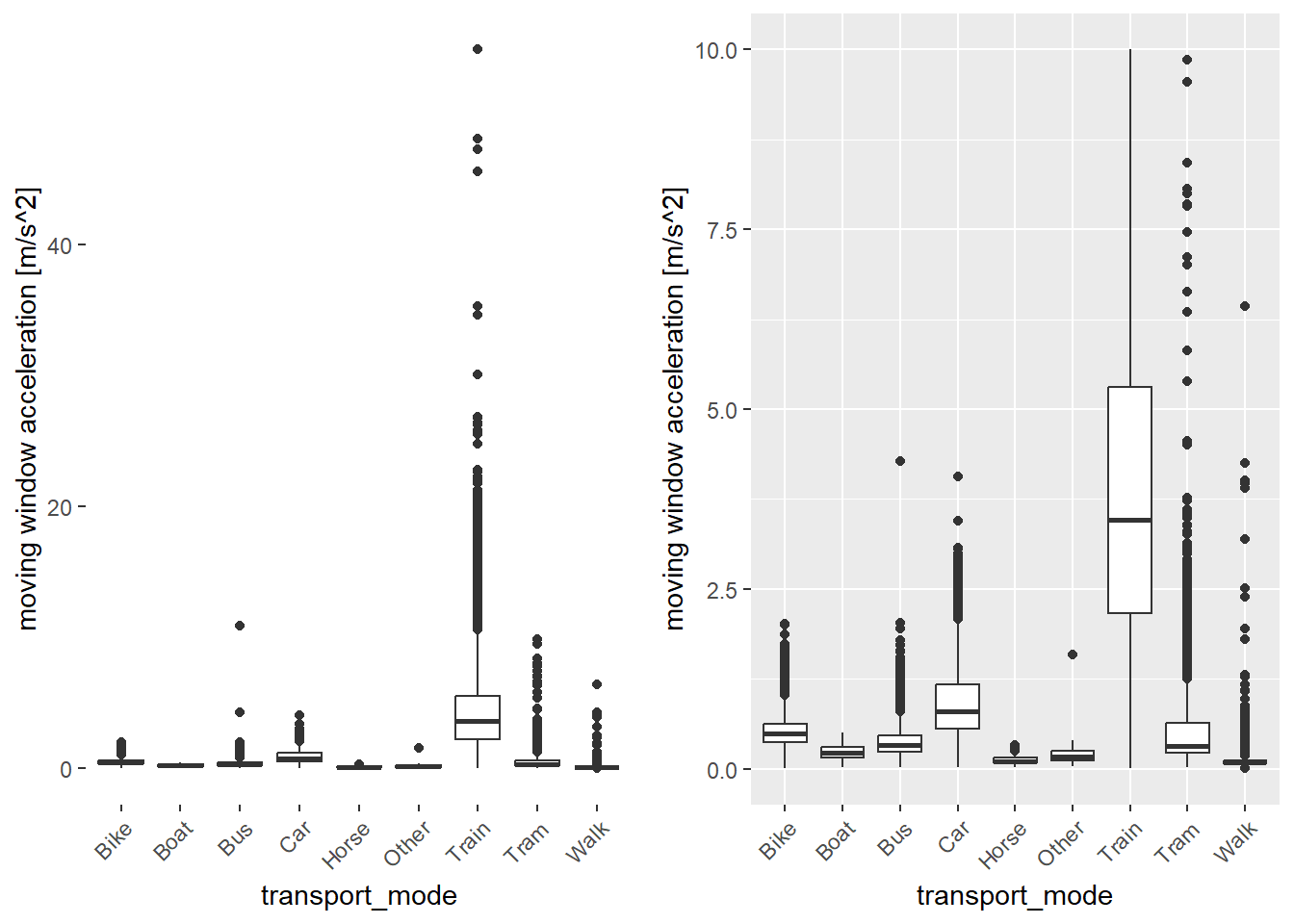
3.7.4 Moving Window Acceleration
The acceleration threshold is set to \(10m/s^2\), as for the single point acceleration values.
Code
boxplot_acceleration_mean <-ggplot(working_dataset, aes(x = transport_mode, y = acceleration_mean)) +geom_boxplot() +theme(axis.text.x =element_text(angle =45, hjust =1)) +ylab("moving window acceleration [m/s^2]")# Set threshold for parametersworking_dataset <- working_dataset[working_dataset$acceleration_mean <10,]boxplot_acceleration_mean_after <-ggplot(working_dataset, aes(x = transport_mode, y = acceleration_mean)) +geom_boxplot() +theme(axis.text.x =element_text(angle =45, hjust =1)) +ylab("moving window acceleration [m/s^2]")# Display the plots side by sidegrid.arrange(boxplot_acceleration_mean, boxplot_acceleration_mean_after, nrow =1)
3.8 Under Sampling
The data set is strongly imbalanced. To improve model accuracy under sampling was used to balance the classes. 500 samples per class are desired. The classes “boat” and “other” do not have sufficient points. The sample size is not further decreased, so enough data is provided to train the and test the computed models.
Code
set.seed(100)# Create copy for later useworking_dataset_full <- working_dataset# Set the maximum number of entries per classmax_entries <-500# Perform under samplingworking_dataset <- working_dataset |>group_by(transport_mode) |>sample_n(min(n(), max_entries)) |>ungroup()# Check the resulting undersampled DataFrametable(working_dataset$transport_mode)
Bike Boat Bus Car Horse Other Train Tram Walk
500 352 500 500 500 395 500 500 500
To classify the data a Support Vector Machine (SVM) is applied. A linear SVM, radial SVM and polynomial SVM are tested. A single-train-test split model and a 10 fold cross validation with 3 repeats was applied. The cross validation improves model robustness compared to the single train-test split and reduces bias resulting in a more representative evaluation of the model performance. The tuning sequences are replaced by the best found hyper parameters for each model, to save computation time.
The models are evaluated with the confusion matrix, the overall accuracy, recall, precision, and F1-Score. A confusion matrix is a table that summarizes the performance of a classification model by showing the counts of true positive, true negative, false positive, and false negative predictions. Precision measures the proportion of correctly predicted positive instances out of the total instances predicted as positive. Recall measures the proportion of correctly predicted positive instances out of the total actual positive instances. The F1-score combines precision and recall into a single metric. It provides a balance between precision and recall and is useful when both false positives and false negatives are important.
Code
# Define Control for 10-fold CVfitControl <-trainControl(## 10-fold CVmethod ="repeatedcv",number =10,repeats =3)
A training and a test data set is created. The training data set contains 80% of the data points and the test set contains 20% of the data points.
Code
set.seed(100)# Convert to Factorworking_dataset$transport_mode <-as.factor(working_dataset$transport_mode)# Create Training and Test Data SetTrainingIndex <-createDataPartition(working_dataset$transport_mode, p =0.8, list = F)TrainingSet <- working_dataset[TrainingIndex,]TestingSet <- working_dataset[-TrainingIndex,]
3.9.1 Liner SVM
A linear support vector machine is tested and the performance evaluated. Different hyper parameter settings were tested to find the best model. For the linear SVM the best fit found is for C = 3 achieving an overall accuracy of 77.87%. Precision, recall and F1-score vary for the classes but average around 78-79%.
Code
# Set seed for reproducibilityset.seed(100)# Perform Linear SVMmodel.svmL <-train(transport_mode ~ ., data = TrainingSet,method ="svmLinear",na.action = na.omit,preprocess =c("scale", "center"),trControl =trainControl(method ="none"),tuneGrid =data.frame(C =3), )# Perform Linear SVM with 10-fold Cross Validation (Reduce Length for shorter computation time)model.svmL.cv <-train(transport_mode ~ ., data = TrainingSet,method ="svmLinear",na.action = na.omit,preprocess =c("sclae","center"),trControl = fitControl,tuneGrid =expand.grid(C =seq(3, 6, length =4) # Find best Fit Model ))# Show Best Tune#print(model.svmL.cv$bestTune)# Make Predictionsmodel.svmL.training <-predict(model.svmL, TrainingSet)model.svmL.testing <-predict(model.svmL, TestingSet)model.svmL.cv.training <-predict(model.svmL.cv, TrainingSet)model.svmL.cv.testing <-predict(model.svmL.cv, TrainingSet)# Model Performancemodel.svmL.training.confusion <-confusionMatrix(model.svmL.training, as.factor(TrainingSet$transport_mode))model.svmL.testing.confusion <-confusionMatrix(model.svmL.testing, as.factor(TestingSet$transport_mode))model.svmL.cv.training.confusion <-confusionMatrix(model.svmL.cv.training, as.factor(TrainingSet$transport_mode))(model.svmL.cv.testing.confusion <-confusionMatrix(model.svmL.cv.testing, as.factor(TrainingSet$transport_mode))) # Print test run with CV
Confusion Matrix and Statistics
Reference
Prediction Bike Boat Bus Car Horse Other Train Tram Walk
Bike 263 0 60 30 1 17 4 8 2
Boat 0 282 0 0 0 0 0 0 0
Bus 36 0 210 10 0 22 4 6 25
Car 6 0 26 334 1 13 1 0 0
Horse 11 0 6 7 390 13 0 0 93
Other 5 0 11 3 1 185 0 2 8
Train 2 0 1 1 0 0 388 0 1
Tram 66 0 67 9 0 40 0 362 39
Walk 11 0 19 6 7 26 3 22 232
Overall Statistics
Accuracy : 0.7787
95% CI : (0.7644, 0.7926)
No Information Rate : 0.1177
P-Value [Acc > NIR] : < 2.2e-16
Kappa : 0.7504
Mcnemar's Test P-Value : NA
Statistics by Class:
Class: Bike Class: Boat Class: Bus Class: Car Class: Horse
Sensitivity 0.6575 1.00000 0.52500 0.83500 0.9750
Specificity 0.9593 1.00000 0.96564 0.98432 0.9566
Pos Pred Value 0.6831 1.00000 0.67093 0.87664 0.7500
Neg Pred Value 0.9545 1.00000 0.93841 0.97812 0.9965
Prevalence 0.1177 0.08299 0.11772 0.11772 0.1177
Detection Rate 0.0774 0.08299 0.06180 0.09829 0.1148
Detection Prevalence 0.1133 0.08299 0.09211 0.11212 0.1530
Balanced Accuracy 0.8084 1.00000 0.74532 0.90966 0.9658
Class: Other Class: Train Class: Tram Class: Walk
Sensitivity 0.58544 0.9700 0.9050 0.58000
Specificity 0.99027 0.9983 0.9263 0.96865
Pos Pred Value 0.86047 0.9873 0.6209 0.71166
Neg Pred Value 0.95884 0.9960 0.9865 0.94531
Prevalence 0.09300 0.1177 0.1177 0.11772
Detection Rate 0.05444 0.1142 0.1065 0.06828
Detection Prevalence 0.06327 0.1157 0.1716 0.09594
Balanced Accuracy 0.78785 0.9842 0.9156 0.77432
Code
# Precision for each classcat("\nPrecision for each class:\n")
# Save the modelssaveRDS(model.svmL, "models/model_svmL.rds")saveRDS(model.svmL.cv, "models/model_svmL_cv.rds")
3.9.2 Radial Support Vector Machine
The radial SVM performs slightly better than the linear SVM with an overall accuracy of 79.27% and similar recall, precision and f1-scores. This model however performs better, since the applied metrics vary less between classes.
Code
# Set seed for reproduceabilityset.seed(108)# Build Training Modelmodel.svmRadial <-train(transport_mode ~ .,data = TrainingSet,method ="svmRadial",na.action = na.omit,preprocess =c("scale", "center"),trControl =trainControl(method ="none"),tuneGrid =expand.grid(sigma =0.8683492, C =5)) # Build CV Model (long processing!!!)TrainingSet$transport_mode <-as.character(TrainingSet$transport_mode)model.svmRadial.cv <-train(transport_mode ~ .,data = TrainingSet,method ="svmRadial",na.action = na.omit,preprocess =c("scale", "center"),trControl = fitControl,tuneGrid =expand.grid(sigma =0.8683492, C =5))(model.svmRadial.cv$bestTune)
sigma C
1 0.8683492 5
Code
# Make Predictionsmodel.svmRadial.training <-predict(model.svmRadial, TrainingSet)model.svmRadial.testing <-predict(model.svmRadial, TestingSet)# Make Predictions from Cross Validation modelmodel.svmRadial.cv.training <-predict(model.svmRadial.cv, TrainingSet)model.svmRadial.cv.testing <-predict(model.svmRadial.cv, TestingSet)# Model Performancemodel.svmRadial.training.confusion <-confusionMatrix(model.svmRadial.training, as.factor(TrainingSet$transport_mode))model.svmRadial.testing.confusion <-confusionMatrix(model.svmRadial.testing, as.factor(TestingSet$transport_mode))model.svmRadial.cv.confusion <-confusionMatrix(model.svmRadial.cv.training, as.factor(TrainingSet$transport_mode))(model.svmRadial.cv.testing.confusion <-confusionMatrix(model.svmRadial.cv.testing, as.factor(TestingSet$transport_mode))) # Print test run with CV
Confusion Matrix and Statistics
Reference
Prediction Bike Boat Bus Car Horse Other Train Tram Walk
Bike 71 0 10 4 1 6 1 1 1
Boat 0 66 0 0 0 0 0 0 0
Bus 11 0 55 4 0 3 0 2 7
Car 2 0 6 85 0 1 0 1 0
Horse 3 0 1 1 97 1 0 0 27
Other 3 0 1 1 0 56 0 1 12
Train 1 4 7 5 0 3 99 4 7
Tram 7 0 16 0 0 6 0 86 9
Walk 2 0 4 0 2 3 0 5 37
Overall Statistics
Accuracy : 0.768
95% CI : (0.7381, 0.796)
No Information Rate : 0.1178
P-Value [Acc > NIR] : < 2.2e-16
Kappa : 0.7384
Mcnemar's Test P-Value : NA
Statistics by Class:
Class: Bike Class: Boat Class: Bus Class: Car Class: Horse
Sensitivity 0.71000 0.94286 0.55000 0.8500 0.9700
Specificity 0.96796 1.00000 0.96395 0.9866 0.9559
Pos Pred Value 0.74737 1.00000 0.67073 0.8947 0.7462
Neg Pred Value 0.96154 0.99489 0.94133 0.9801 0.9958
Prevalence 0.11779 0.08245 0.11779 0.1178 0.1178
Detection Rate 0.08363 0.07774 0.06478 0.1001 0.1143
Detection Prevalence 0.11190 0.07774 0.09658 0.1119 0.1531
Balanced Accuracy 0.83898 0.97143 0.75698 0.9183 0.9630
Class: Other Class: Train Class: Tram Class: Walk
Sensitivity 0.70886 0.9900 0.8600 0.37000
Specificity 0.97662 0.9586 0.9493 0.97864
Pos Pred Value 0.75676 0.7615 0.6935 0.69811
Neg Pred Value 0.97032 0.9986 0.9807 0.92085
Prevalence 0.09305 0.1178 0.1178 0.11779
Detection Rate 0.06596 0.1166 0.1013 0.04358
Detection Prevalence 0.08716 0.1531 0.1461 0.06243
Balanced Accuracy 0.84274 0.9743 0.9046 0.67432
Code
# Precision for each classcat("\nPrecision for each class:\n")
# Save the modelssaveRDS(model.svmRadial, "models/model_svmRadial.rds")saveRDS(model.svmRadial.cv, "models/model_svmRadial_cv.rds")
3.9.3 Polynomial SVM
Out of all tested models the polynomial SVM achieved the highest overall accuracy with 79.15% and the best performance for recall, precision and F1-score. The by class performance is significantly better compared to the other models. The Cohen’s Kappa value lies at 0.76 indicating high agreement between the predictions and ground truth labels. The p-value indicates that the accuracy of the polynomial SVM model is significantly better than the no information rate.
Code
set.seed(100)# Build Training Modelmodel.svmPoly <-train(transport_mode ~ ., data = TrainingSet,method ="svmPoly",na.action = na.omit,preprocess =c("sclae","center"),trControl =trainControl(method ="none"),tuneGrid =data.frame(degree =3, scale =0.1, C =4) )# Build CV Model (long processing)TrainingSet$transport_mode <-as.character(TrainingSet$transport_mode)model.svmPoly.cv <-train(transport_mode ~ ., data = TrainingSet,method ="svmPoly",na.action = na.omit,preprocess =c("sclae","center"),trControl = fitControl,tuneGrid =data.frame(degree =3, scale =0.1, C =4) # Fit Model) )(model.svmPoly.cv$bestTune)
degree scale C
1 3 0.1 4
Code
# Make Predictionsmodel.svmPoly.training <-predict(model.svmPoly, TrainingSet)model.svmPoly.testing <-predict(model.svmPoly, TestingSet)# Make Predictions from Cross Validation modelmodel.svmPoly.cv.training <-predict(model.svmPoly.cv, TrainingSet)model.svmPoly.cv.testing <-predict(model.svmPoly.cv, TestingSet)# Model Performancemodel.svmPoly.training.confusion <-confusionMatrix(model.svmPoly.training, as.factor(TrainingSet$transport_mode))model.svmPoly.testing.confusion <-confusionMatrix(model.svmPoly.testing, as.factor(TestingSet$transport_mode))model.svmPoly.cv.confusion <-confusionMatrix(model.svmPoly.cv.training, as.factor(TrainingSet$transport_mode))(model.svmPoly.cv.testing.confusion <-confusionMatrix(model.svmPoly.cv.testing, as.factor(TestingSet$transport_mode))) # Print test run with CV
Confusion Matrix and Statistics
Reference
Prediction Bike Boat Bus Car Horse Other Train Tram Walk
Bike 77 0 16 4 0 2 1 3 0
Boat 0 70 0 0 0 0 0 0 0
Bus 5 0 48 5 0 3 2 3 4
Car 3 0 11 86 0 2 2 0 1
Horse 2 0 1 2 97 2 0 0 27
Other 4 0 4 1 1 60 0 0 8
Train 0 0 2 1 0 0 95 1 1
Tram 9 0 13 0 0 5 0 89 14
Walk 0 0 5 1 2 5 0 4 45
Overall Statistics
Accuracy : 0.7856
95% CI : (0.7565, 0.8128)
No Information Rate : 0.1178
P-Value [Acc > NIR] : < 2.2e-16
Kappa : 0.7584
Mcnemar's Test P-Value : NA
Statistics by Class:
Class: Bike Class: Boat Class: Bus Class: Car Class: Horse
Sensitivity 0.77000 1.00000 0.48000 0.8600 0.9700
Specificity 0.96529 1.00000 0.97063 0.9746 0.9546
Pos Pred Value 0.74757 1.00000 0.68571 0.8190 0.7405
Neg Pred Value 0.96917 1.00000 0.93325 0.9812 0.9958
Prevalence 0.11779 0.08245 0.11779 0.1178 0.1178
Detection Rate 0.09069 0.08245 0.05654 0.1013 0.1143
Detection Prevalence 0.12132 0.08245 0.08245 0.1237 0.1543
Balanced Accuracy 0.86764 1.00000 0.72531 0.9173 0.9623
Class: Other Class: Train Class: Tram Class: Walk
Sensitivity 0.75949 0.9500 0.8900 0.45000
Specificity 0.97662 0.9933 0.9453 0.97730
Pos Pred Value 0.76923 0.9500 0.6846 0.72581
Neg Pred Value 0.97536 0.9933 0.9847 0.93011
Prevalence 0.09305 0.1178 0.1178 0.11779
Detection Rate 0.07067 0.1119 0.1048 0.05300
Detection Prevalence 0.09187 0.1178 0.1531 0.07303
Balanced Accuracy 0.86806 0.9717 0.9176 0.71365
Code
# Precision for each classcat("\nPrecision for each class:\n")
# Save the modelssaveRDS(model.svmPoly, "models/model_svmPoly.rds")saveRDS(model.svmPoly.cv, "models/model_svmPoly_cv.rds")
Since the polynomial SVM showed the best performance, this model is used to predict the transport mode on the full data set, containing 40’525 data points after preprocessing and threshold filtering. The achieved overall accuracy is 81.65% with the 95% confidence interval of [81.27%, 82.03%]. The full data set is very imbalanced, nevertheless the unweighted averaged F1-score lies at 75%
Code
# Set seed for reproducibilityset.seed(100)# Run Model on full data setmodel.final <-predict(model.svmPoly.cv, working_dataset_full)# Create final data frameworking_dataset_result <-data.frame(working_dataset_full, model.final) # Confusion Matrix for new resultsconf_matrix <-confusionMatrix(as.factor(working_dataset_result$transport_mode), as.factor(working_dataset_result$model.final))cat("Confusion Matrix:\n")
Confusion Matrix:
Code
conf_matrix
Confusion Matrix and Statistics
Reference
Prediction Bike Boat Bus Car Horse Other Train Tram Walk
Bike 1520 0 79 24 40 70 2 91 27
Boat 0 352 0 0 0 0 0 0 0
Bus 494 0 2015 286 45 146 18 533 199
Car 343 0 228 4408 125 146 26 26 49
Horse 15 0 2 6 3613 18 0 0 63
Other 4 0 4 5 14 320 0 28 20
Train 137 0 67 110 1 4 12379 69 17
Tram 165 0 106 22 0 35 48 3945 177
Walk 140 0 220 34 1866 447 19 633 4483
Overall Statistics
Accuracy : 0.8151
95% CI : (0.8113, 0.8189)
No Information Rate : 0.3082
P-Value [Acc > NIR] : < 2.2e-16
Kappa : 0.7761
Mcnemar's Test P-Value : NA
Statistics by Class:
Class: Bike Class: Boat Class: Bus Class: Car Class: Horse
Sensitivity 0.53939 1.000000 0.74054 0.9005 0.63342
Specificity 0.99117 1.000000 0.95448 0.9735 0.99701
Pos Pred Value 0.82029 1.000000 0.53935 0.8238 0.97202
Neg Pred Value 0.96644 1.000000 0.98081 0.9862 0.94320
Prevalence 0.06953 0.008685 0.06714 0.1208 0.14074
Detection Rate 0.03750 0.008685 0.04972 0.1088 0.08915
Detection Prevalence 0.04572 0.008685 0.09218 0.1320 0.09171
Balanced Accuracy 0.76528 1.000000 0.84751 0.9370 0.81521
Class: Other Class: Train Class: Tram Class: Walk
Sensitivity 0.269815 0.9910 0.74085 0.8904
Specificity 0.998094 0.9856 0.98429 0.9054
Pos Pred Value 0.810127 0.9683 0.87706 0.5717
Neg Pred Value 0.978422 0.9959 0.96170 0.9831
Prevalence 0.029264 0.3082 0.13139 0.1242
Detection Rate 0.007896 0.3054 0.09734 0.1106
Detection Prevalence 0.009746 0.3154 0.11098 0.1935
Balanced Accuracy 0.633954 0.9883 0.86257 0.8979
Code
# Precision for each classprecision <- conf_matrix$byClass[, "Precision"]cat("\nPrecision for each class:\n")
Precision for each class:
Code
precision
Class: Bike Class: Boat Class: Bus Class: Car Class: Horse Class: Other
0.8202914 1.0000000 0.5393469 0.8237713 0.9720204 0.8101266
Class: Train Class: Tram Class: Walk
0.9683198 0.8770565 0.5716654
Code
# Average Precisionavg_precision <-mean(conf_matrix$byClass[, "Precision"])cat("\nAverage Precision:\n")
Average Precision:
Code
avg_precision
[1] 0.8202887
Code
# Recall for each classrecall <- conf_matrix$byClass[, "Recall"]cat("\nRecall for each class:\n")
Recall for each class:
Code
recall
Class: Bike Class: Boat Class: Bus Class: Car Class: Horse Class: Other
0.5393896 1.0000000 0.7405366 0.9005107 0.6334151 0.2698145
Class: Train Class: Tram Class: Walk
0.9909542 0.7408451 0.8903674
Code
# Average Recallavg_recall <-mean(conf_matrix$byClass[, "Recall"])cat("\nAverage Recall:\n")
Average Recall:
Code
avg_recall
[1] 0.7450926
Code
# F1-Score for each classf1_score <- conf_matrix$byClass[, "F1"]cat("\nF1-Score for each class:\n")
F1-Score for each class:
Code
f1_score
Class: Bike Class: Boat Class: Bus Class: Car Class: Horse Class: Other
0.6508242 1.0000000 0.6241289 0.8604333 0.7670099 0.4048071
Class: Train Class: Tram Class: Walk
0.9795063 0.8032169 0.6962802
Code
# Average F1-Scoreavg_f1_score <-mean(conf_matrix$byClass[, "F1"])cat("\nAverage F1-Score:\n")
Average F1-Score:
Code
avg_f1_score
[1] 0.754023
Code
# Save working_dataset_result as a CSV filewrite.csv(working_dataset_result, "data/working_dataset_result.csv", row.names =FALSE)
The resulting class distribution shows that the model predicts too many points as train. This boosts the models performance, since the train class is strongly over represented in this data set. A significant number of false classifications etween the transport modes Car, Bus, Bike and Tram was expected, since key parameters such as velocity and acceleration lie in similar ranges and are difficult to distinguish by the model.
Bike Boat Bus Car Horse Other Train Tram Walk
1853 352 3736 5351 3717 395 12784 4498 7842
Code
table(working_dataset_result$model.final)
Bike Boat Bus Car Horse Other Train Tram Walk
2818 352 2721 4895 5704 1186 12492 5325 5035
3.10 Post Processing
To boost the model performance some simple post processing is applied. A moving window function is used to find misclassified points within segments. This function searches within x neighbors of a point and if a given percentage of these points belong to one class the point is reclassified as the majority of its neighboring points. This process can be applied iteratively.
For this data set a window size of 1, a threshold percentage of 75% and 3 iterations results in a smoothing of the results, but not necessarily a gain in model accuracy. After postprocessing an increase of 3-4% overall accuracy was found.
Code
# Run a loop to identify outlier points in classification. If prevous and following x points are identical, # but the middle one is different it is changed# Define the number of previous and following points to consider# x: Number of points to be looked at surrounding current value in each direction (x*2 neighbours considered)# threshold_percentage: number of points which have to be equal so the current value gets changed# i: number of iterationssingle_point_correction <-function(df, x, threshold_percentage, iterations) {# Track the number of points changed changed_count <-0for (iter in1:iterations) {for (i in (x +1):(nrow(df) - x)) { current_value <- df$model.final[i]# Find x-Previous & x-Following Values around point i previous_values <- df$model.final[(i - x):(i -1)] following_values <- df$model.final[(i +1):(i + x)]# Calculate the number of occurrences for each class in the surrounding points class_counts <-table(c(previous_values, following_values))# Find the class that occurs most frequently most_frequent_class <-names(class_counts)[which.max(class_counts)]# Check if the most frequent class exceeds the threshold countif (class_counts[most_frequent_class] > threshold_percentage *length(c(previous_values, following_values))) { df$model.final[i] <- most_frequent_class changed_count <- changed_count +1 } }message("Metrics after each iteration:") conf_matrix_func <-confusionMatrix(as.factor(df$transport_mode), as.factor(df$model.final))# Precision for each classcat("\n Mean Precision\n")print(precision_func <-mean(conf_matrix_func$byClass[, "Precision"]))# Recall for each classcat("\n Mean Recall\n")print(recall_func <-mean(conf_matrix_func$byClass[, "Recall"]))# F1-Score for each classcat("\n Mean F1-Score\n")print(f1_score_func <-mean(conf_matrix_func$byClass[, "F1"])) }message("Number of times the condition is true and values are updated:", changed_count)return(df)}working_dataset_result_copy <- working_dataset_resultworking_dataset_result <-single_point_correction(working_dataset_result, 10, 0.75, 3)
Mean Precision
[1] 0.8486992
Mean Recall
[1] 0.7729815
Mean F1-Score
[1] 0.7830847
Mean Precision
[1] 0.8491123
Mean Recall
[1] 0.7735217
Mean F1-Score
[1] 0.783549
Mean Precision
[1] 0.8491773
Mean Recall
[1] 0.7735824
Mean F1-Score
[1] 0.7835973
Code
# Confusion Matrix for new resultsconf_matrix_2 <-confusionMatrix(as.factor(working_dataset_result$transport_mode), as.factor(working_dataset_result$model.final))cat("Confusion Matrix:\n")
Confusion Matrix:
Code
conf_matrix_2
Confusion Matrix and Statistics
Reference
Prediction Bike Boat Bus Car Horse Other Train Tram Walk
Bike 1669 0 19 12 38 57 0 48 10
Boat 0 352 0 0 0 0 0 0 0
Bus 485 0 2116 295 43 133 15 457 192
Car 346 0 174 4535 101 106 17 23 49
Horse 0 0 0 3 3702 1 0 0 11
Other 3 0 3 5 14 338 0 21 11
Train 96 0 47 82 1 4 12497 41 16
Tram 87 0 57 22 0 18 20 4145 149
Walk 113 0 200 35 1977 337 17 636 4527
Overall Statistics
Accuracy : 0.836
95% CI : (0.8323, 0.8396)
No Information Rate : 0.3101
P-Value [Acc > NIR] : < 2.2e-16
Kappa : 0.8012
Mcnemar's Test P-Value : NA
Statistics by Class:
Class: Bike Class: Boat Class: Bus Class: Car Class: Horse
Sensitivity 0.59628 1.000000 0.80887 0.9090 0.63002
Specificity 0.99512 1.000000 0.95727 0.9770 0.99957
Pos Pred Value 0.90070 1.000000 0.56638 0.8475 0.99596
Neg Pred Value 0.97078 1.000000 0.98641 0.9871 0.94094
Prevalence 0.06906 0.008685 0.06455 0.1231 0.14499
Detection Rate 0.04118 0.008685 0.05221 0.1119 0.09134
Detection Prevalence 0.04572 0.008685 0.09218 0.1320 0.09171
Balanced Accuracy 0.79570 1.000000 0.88307 0.9430 0.81479
Class: Other Class: Train Class: Tram Class: Walk
Sensitivity 0.340040 0.9945 0.7717 0.9118
Specificity 0.998558 0.9897 0.9900 0.9068
Pos Pred Value 0.855696 0.9776 0.9215 0.5773
Neg Pred Value 0.983654 0.9975 0.9660 0.9866
Prevalence 0.024526 0.3101 0.1325 0.1225
Detection Rate 0.008340 0.3084 0.1023 0.1117
Detection Prevalence 0.009746 0.3154 0.1110 0.1935
Balanced Accuracy 0.669299 0.9921 0.8808 0.9093
Code
# Precision for each classprecision_2 <- conf_matrix_2$byClass[, "Precision"]cat("\nPrecision for each class:\n")
Precision for each class:
Code
precision_2
Class: Bike Class: Boat Class: Bus Class: Car Class: Horse Class: Other
0.9007016 1.0000000 0.5663812 0.8475051 0.9959645 0.8556962
Class: Train Class: Tram Class: Walk
0.9775501 0.9215207 0.5772762
Code
# Average Precisionavg_precision_2 <-mean(conf_matrix_2$byClass[, "Precision"])cat("\nAverage Precision:\n")
Average Precision:
Code
avg_precision_2
[1] 0.8491773
Code
# Recall for each classrecall_2 <- conf_matrix_2$byClass[, "Recall"]cat("\nRecall for each class:\n")
Recall for each class:
Code
recall_2
Class: Bike Class: Boat Class: Bus Class: Car Class: Horse Class: Other
0.5962844 1.0000000 0.8088685 0.9089998 0.6300204 0.3400402
Class: Train Class: Tram Class: Walk
0.9945090 0.7717371 0.9117825
Code
# Average Recallavg_recall_2 <-mean(conf_matrix_2$byClass[, "Recall"])cat("\nAverage Recall:\n")
Average Recall:
Code
avg_recall_2
[1] 0.7735824
Code
# F1-Score for each classf1_score_2 <- conf_matrix_2$byClass[, "F1"]cat("\nF1-Score for each class:\n")
F1-Score for each class:
Code
f1_score_2
Class: Bike Class: Boat Class: Bus Class: Car Class: Horse Class: Other
0.7175408 1.0000000 0.6662469 0.8771760 0.7718128 0.4866811
Class: Train Class: Tram Class: Walk
0.9859566 0.8400041 0.7069571
Code
# Average F1-Scoreavg_f1_score <-mean(conf_matrix_2$byClass[, "F1"])cat("\nAverage F1-Score:\n")
Average F1-Score:
Code
avg_f1_score
[1] 0.7835973
Code
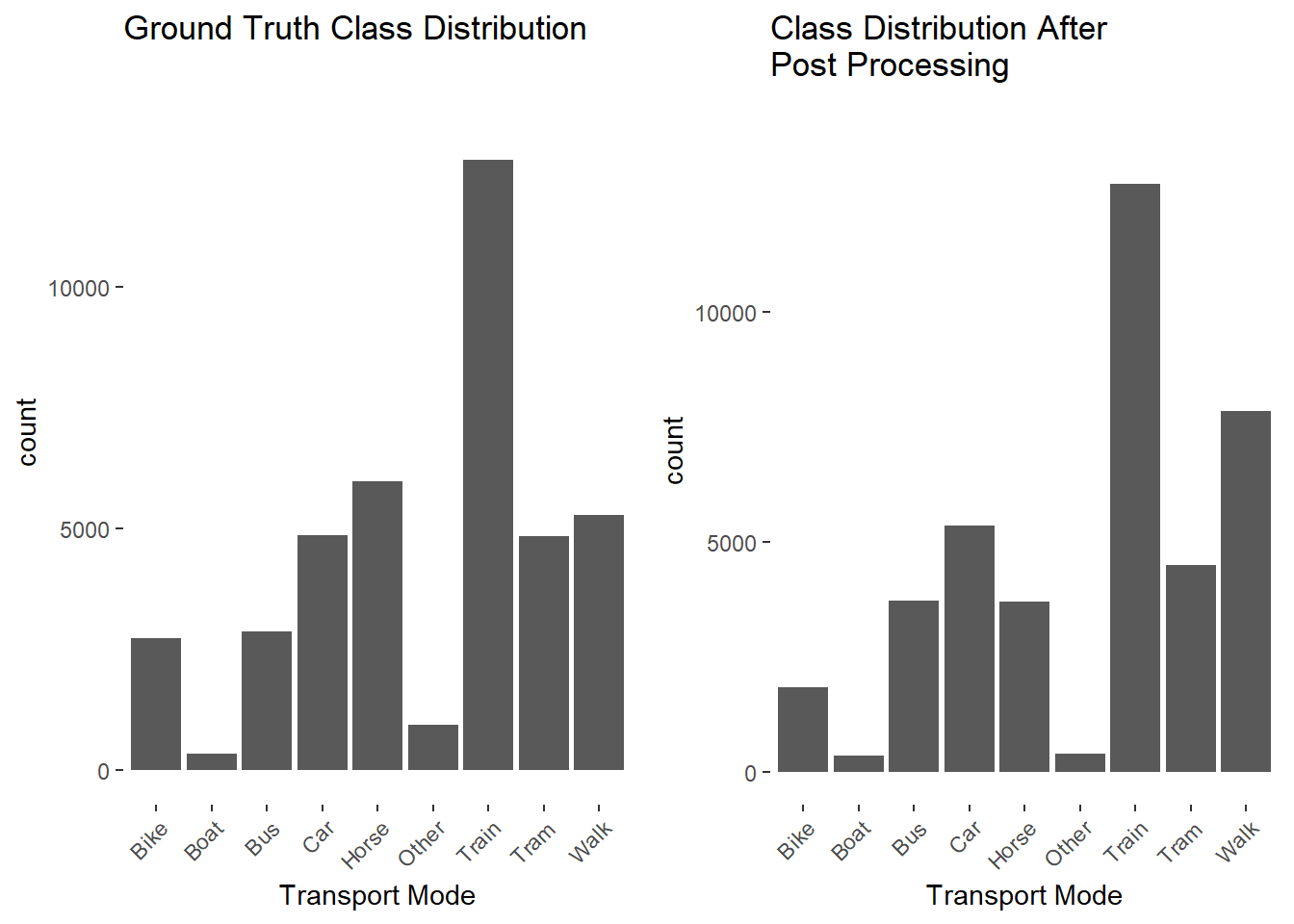
# Show class distributionfinal_classes <-ggplot(working_dataset_result) +geom_bar(aes(x = model.final)) +theme(axis.text.x =element_text(angle =45, hjust =1)) +ylim(c(0,14000)) +ggtitle("Ground Truth Class Distribution") +xlab("Transport Mode")classes <-ggplot(working_dataset_result) +geom_bar(aes(x = transport_mode)) +theme(axis.text.x =element_text(angle =45, hjust =1)) +ylim(c(0,14000)) +ggtitle("Class Distribution After \nPost Processing") +xlab("Transport Mode")grid.arrange(final_classes,classes, nrow =1)
Code
cat("Ground Truth\n")
Ground Truth
Code
table(working_dataset_result$transport_mode)
Bike Boat Bus Car Horse Other Train Tram Walk
1853 352 3736 5351 3717 395 12784 4498 7842
Code
cat("\nClassification \n")
Classification
Code
table(working_dataset_result$model.final)
Bike Boat Bus Car Horse Other Train Tram Walk
2799 352 2616 4989 5876 994 12566 5371 4965
The below map allows the comparison between wrongly classified points and ground truth to explore where the model fails.
The preprocessing of GPS data plays a crucial role in influencing the classification results. While individual computed parameters such as velocity, acceleration, and sinuosity provide valuable information, they are insufficient to construct a robust model on their own. However, applying moving window functions to these parameters can greatly enhance the accuracy of the model,67 .
To effectively differentiate between similar classes like buses, trams, cars, bikes, and boats, additional parameters need to be considered. For instance, incorporating the distance to public traffic networks specific to each transport mode can significantly improve the accuracy of the model. These additional parameters provide valuable contextual information that aids in distinguishing between similar classes.
In urban settings, distinguishing between bus, tram, and car travel poses a particular challenge due to the characteristic stop-and-go movement patterns. The frequent fluctuations between low velocities and accelerations make it difficult to discern the specific class. These movement patterns can correspond to multiple classes and create ambiguity in the classification process. By addressing these challenges model accuracy can be enhanced.
5. Discussion
In order to enhance the overall classification accuracy, it is crucial to adopt a more strategic approach to test various parameters and their impact on the classification results. This includes exploring different preprocessing techniques, employing diverse models, and implementing appropriate post-processing steps. Specifically moving window size, which imparts a smoothing effect on computed parameters, and the hyper parameters of the SVM models could benefit from further refinement with increased computational power.
In related studies on transport mode detection, segmentation has been successfully applied to the data,8.9 In this context, point data was utilized to investigate whether the classification model could autonomously identify distinct segments. Preliminary results suggest that the model often identifies segments, but further analysis is necessary to validate these findings. Furthermore, Biljecki et al.10 proposed categorizing different transport modes into land, water, and air travel and classify each individually. This approach was not implemented, but by incorporating distance-to-water calculations to identify instances of boat travel, it is possible to identify boat travel within the same model as land travel.
To improve the data quality of GPS data, there are several potential avenues to explore. One approach is to employ a quicker sampling interval, allowing for more frequent data points to be captured. Additionally, supplementing GPS data with accelerator data, as demonstrated by Roy et al.,11 has been shown to enhance model performance, leading to an accuracy improvement of approximately 90%.
Ultimately, the quality of GPS data is the key-weakness of the model implemented in this project, despite the data quality it is shown that it is possible to classify transport modes with an approximate 85% accuracy.
References
Code
wordcountaddin::text_stats("index.qmd")
Method
koRpus
stringi
Word count
3027
2955
Character count
19721
19764
Sentence count
201
Not available
Reading time
15.1 minutes
14.8 minutes
References
Biljecki, Filip, Hugo Ledoux, and Peter van Oosterom. “Transportation Mode-Based Segmentation and Classification of Movement Trajectories.”International Journal of Geographical Information Science 27 (February 2013): 385–407. doi:10.1080/13658816.2012.692791.
Geoinformation Kt. Bern, Amt für. “Öffentlicher Verkehr,” 2023.
Raumentwicklung Kt. Zürich, Amt für. “Linien Des Öffentlichen Verkehrs,” 2022.
Roy, Avipsa, Daniel Fuller, Kevin Stanley, and Trisalyn Nelson. “Classifying Transport Mode from Global Positioning Systems and Accelerometer Data: A Machine Learning Approach.”Findings, September 2020. doi:10.32866/001c.14520.
Topography swisstopo, Federal Office of. “swissTLM3D,” 2023.
Transport FOT, Federal Bureau of. “Öffentlicher Verkehr,” 2023.